Electric Motors and Controls
Our vendor partners include Danfoss PLUS+1 Mobile Control Systems, Danfoss Editron Motors & Convertors, Envolt Battery Powered Systems and ElevatIoT Diagnostics.

Industrial Automation
Our engineering team has experience with mechanical solutions, PLC programming, industrial software design, VFD specification. We provide installation and startup for all systems.

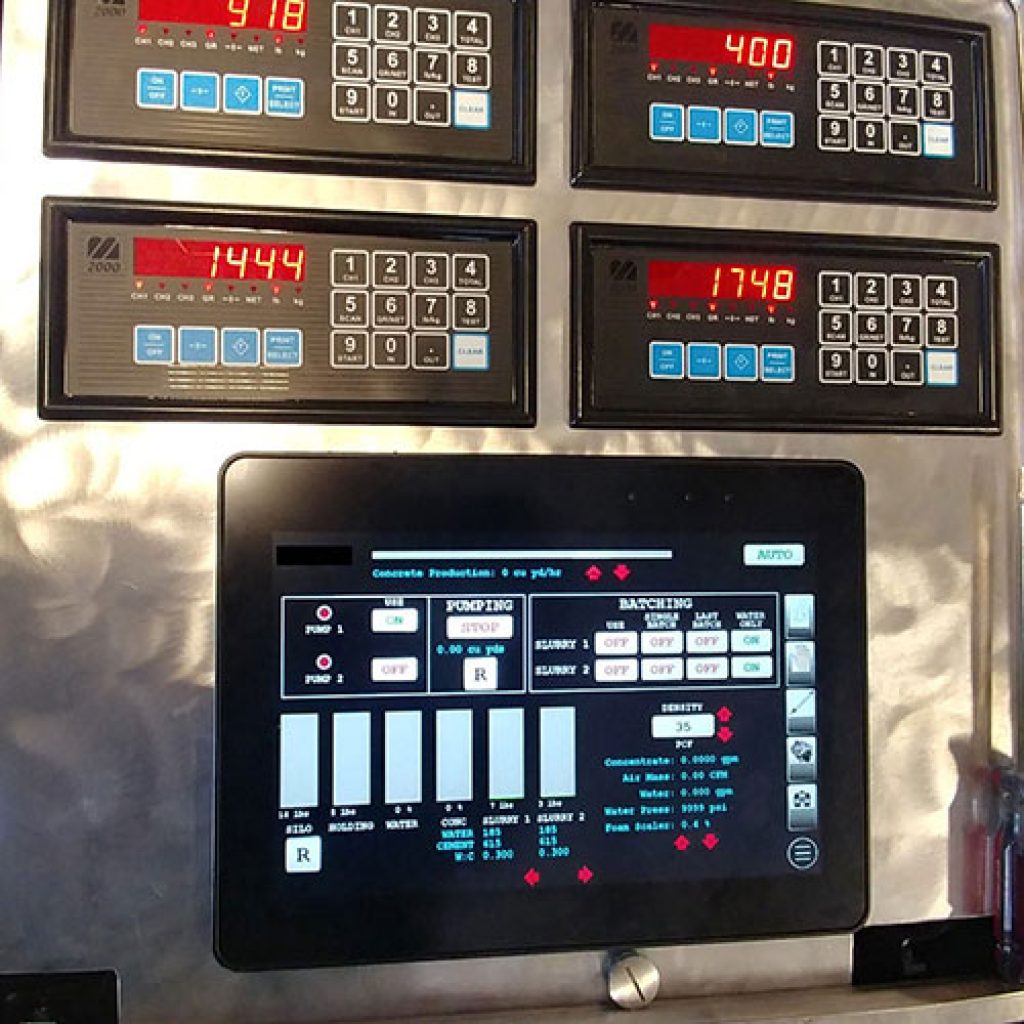
Software Development
We have experience with HMI development, PLC programming, IoT configuration, mobile automation development and drive configurations.